About
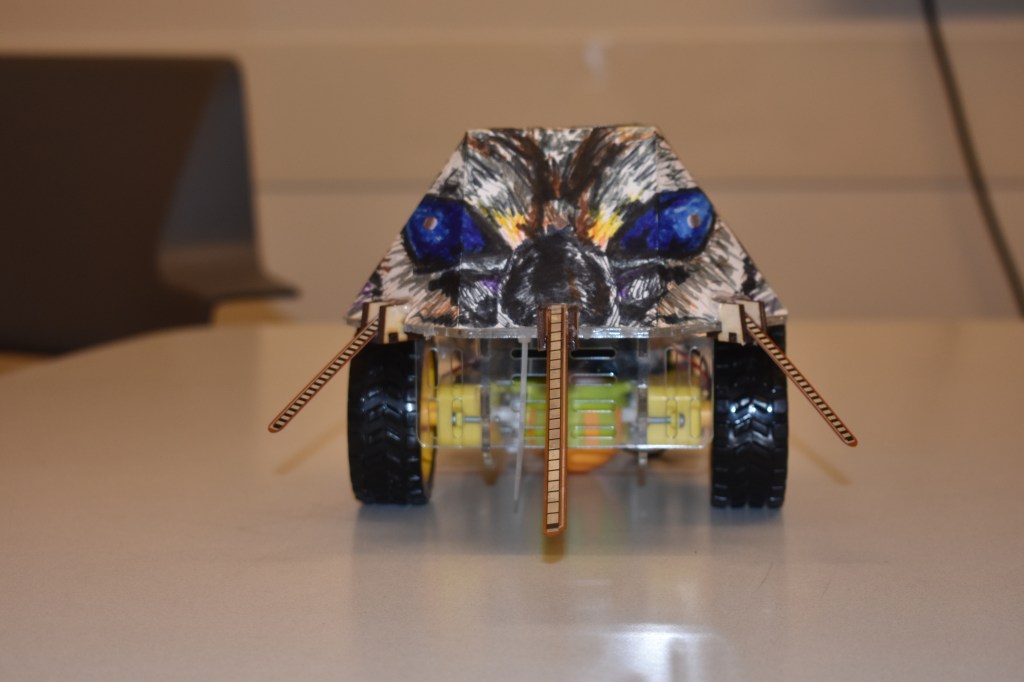
The Moth was the name that my group gave our freshman year Cornerstone of Engineering final project. It was an autonomous, light-following robot.
My Tasks
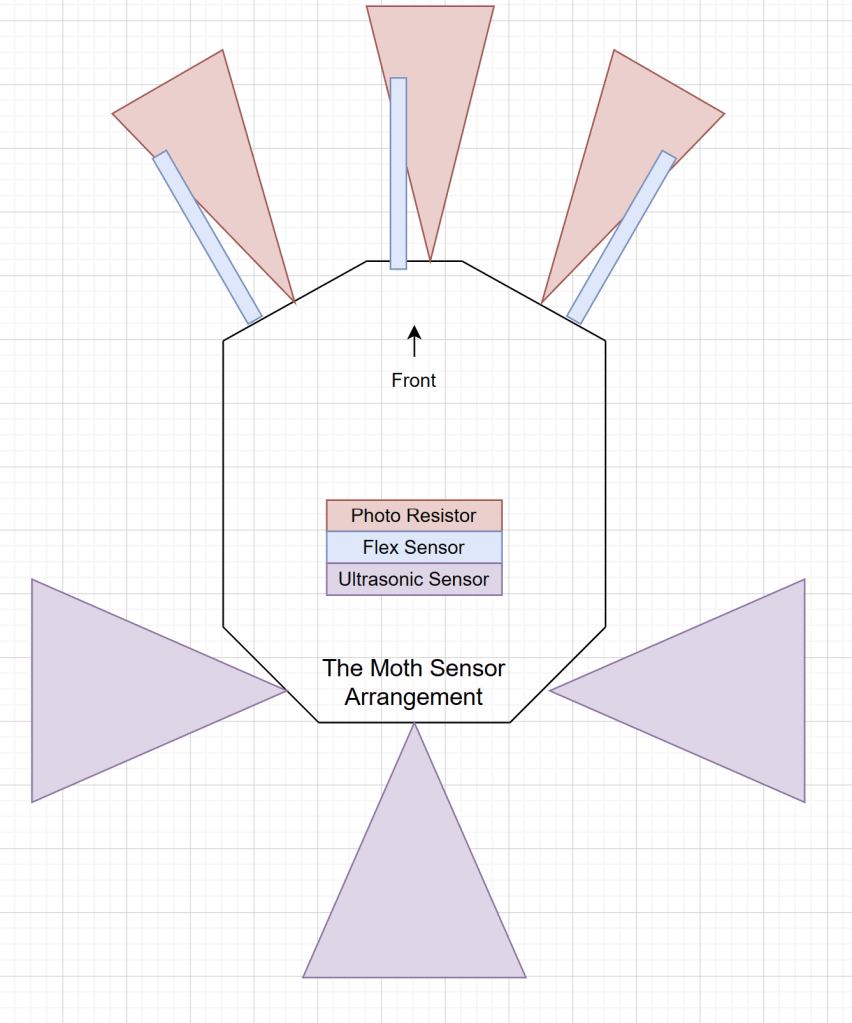
My first task was sensor selection. Given that our robot needed to follow light, photoresistors were the easy choice. The next function our robot needed to have was the ability to avoid walls. Many groups selected ultrasonic sensors, however I went a different route because they have accuracy issues and are prone to false positives. In the end I selected resistive flex sensors as they don’t have the same issues and are much easier to connect to an Arduino. Although we did use some ultrasonic sensors as a backup camera of sorts.
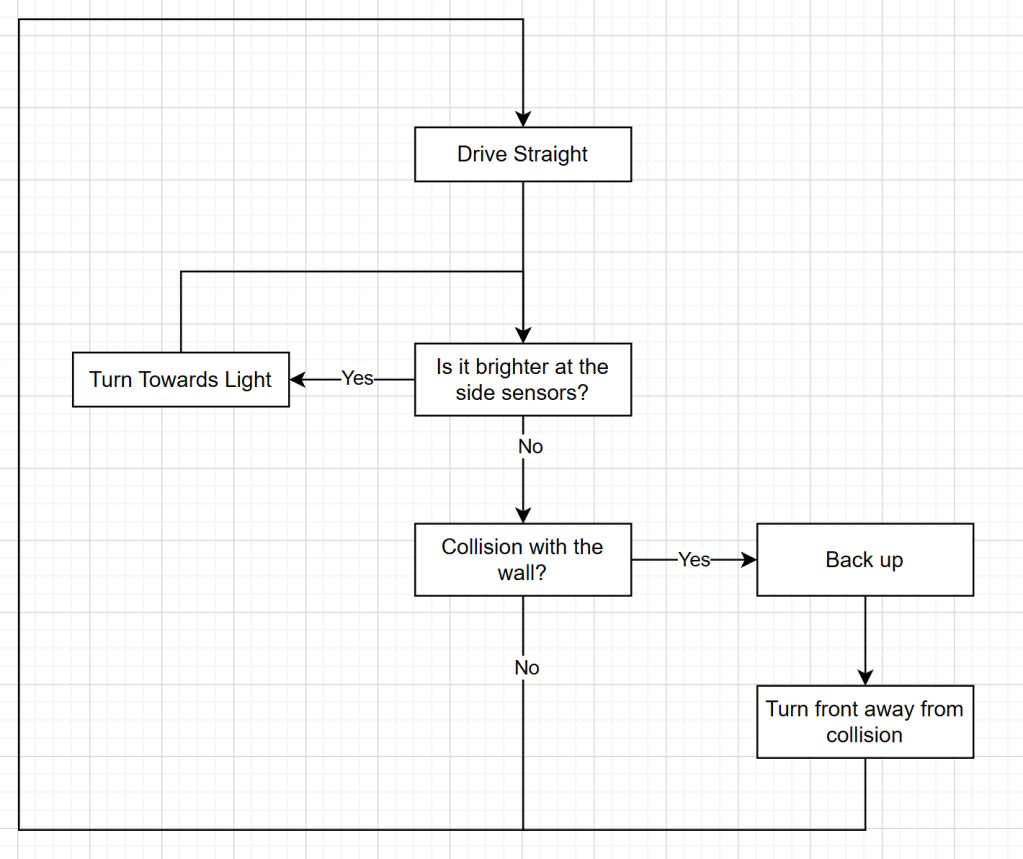
I was also responsible for the code. By placing the photoresistors and flex sensors laid out as pictured below. I was able to implement the following algorithm for autonomy.